Space Surveillance Cameras for Orbital Debris Monitoring and On-Orbit Self-Defense Applications
- January 31, 2026
- CAVU Aerospace UK
The rapid growth of satellite constellations and orbital infrastructure has significantly increased the density of artificial objects in Earth orbit. Space debris and uncooperative spacecraft now pose a critical risk to mission continuity, asset protection, and long-term orbital sustainability. Optical camera systems—particularly compact, high-performance payloads in standardized form factors—are emerging as essential components of modern Space Situational Awareness and on-orbit self-defense architectures. This article examines the debris environment, the role of space surveillance, and the technical requirements for next-generation surveillance and defensive camera payloads.
CAVU Aerospace has delivered few cameras in Cube form factor from 2U to 12U with 5MP to 51 MP with bespoke design optic systems for self-defence applications.
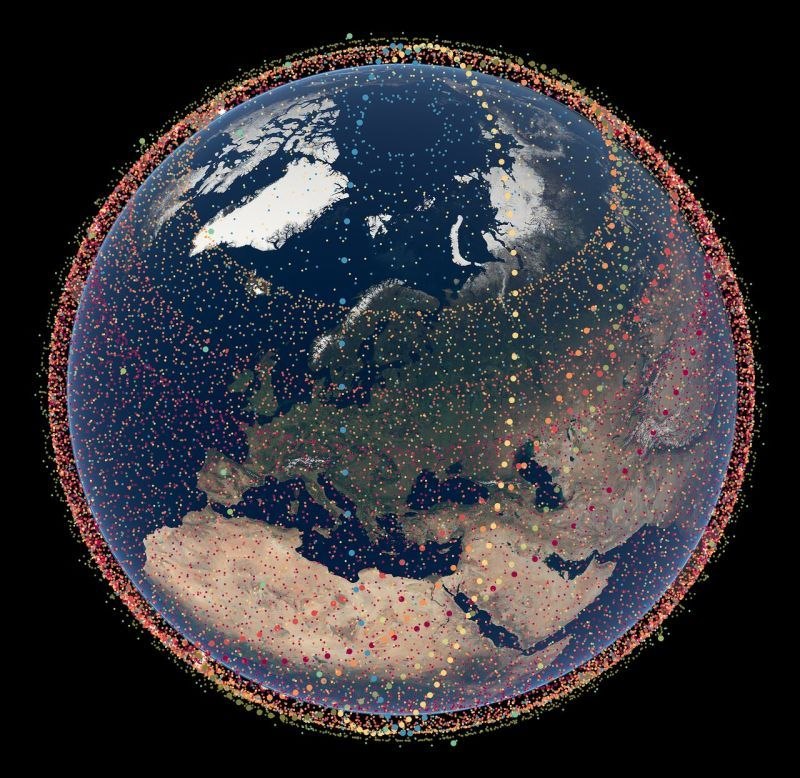
The Orbital Debris Environment
Earth orbit currently contains:
- 36,000 tracked objects larger than 10 cm
- Hundreds of thousands of fragments larger than 1 cm
- Millions of millimeter-scale particles
Relative velocities in Low Earth Orbit range from 7–14 km/s, meaning even sub-centimeter debris can cause catastrophic damage to optical payloads, solar arrays, and pressure vessels.
Key debris sources include:
- Fragmentation from historical collisions
- Anti-satellite (ASAT) test debris
- Mission-related objects (adapters, covers, bolts)
- Aging satellites without de-orbit capability
The risk is compounded by the Kessler Syndrome feedback mechanism, where each collision increases the probability of subsequent collisions, threatening the long-term usability of certain orbital regimes.
Role of Space Surveillance Cameras in SSA
Complement to Radar Systems
While radar systems provide wide-area detection, optical camera payloads offer:
- Higher angular resolution
- Passive detection (no emissions)
- Improved characterization (shape, rotation, attitude)
- Detection of non-cooperative or low radar cross-section objects
- Reduced power consumption compared to radar payloads
Space-based cameras additionally eliminate atmospheric distortion and enable continuous monitoring across orbital planes.
Self-Defense Camera Payloads
In the context of spacecraft protection, a “self-defense camera system” does not imply kinetic countermeasures, but rather:
- Early detection of collision threats
- Autonomous tracking of nearby objects
- Classification of debris vs. spacecraft
- Threat vector estimation
- Cueing of avoidance maneuvers
- Monitoring of proximity operations and rendezvous events
Technical Requirements for Space Surveillance & Self-Defense Cameras
Optical Design
Parameter | Typical Requirement |
Aperture | 25–120 mm (mission dependent) |
F-number | f/1.2 – f/2.8 |
Spectral range | 400–900 nm (VIS/NIR) |
Optional bands | SWIR (1–1.7 μm) |
Stray light suppression | Baffles + low-reflectivity coatings |
Wide-field configurations are used for detection; narrow-field optics are used for high-precision tracking and characterization.
Image Sensor Performance
Key parameters:
- Quantum Efficiency: >70% (VIS preferred)
- Read noise: <2 e⁻ RMS
- Dark current: <0.1 e⁻/pixel/sec (cooled)
- Global shutter preferred for fast motion capture
- Radiation-tolerant CMOS or EMCCD technologies
Sensor resolution trade-off:
- 2U–3U platforms: 5-16 MP (LDU345 Platform)
- 12U platforms: 51 MP (Eagle eye)
Temporal Performance
Feature | Requirement |
Frame rate | 10–120 FPS |
Exposure time | 0.1 ms – 50 ms |
Motion compensation | Onboard |
Rolling object tracking | Required |
High frame rates are essential to minimize streaking and enable velocity estimation.
Onboard Processing & Autonomy
Modern surveillance cameras increasingly incorporate:
- FPGA/SoC for real-time processing
- CNN-based object detection
- Star-field subtraction algorithms
- Kalman filtering for orbit estimation
- Object brightness & rotation analysis
This reduces downlink load and enables autonomous threat assessment.
Pointing Knowledge & Calibration
Precision tracking requires:
- Star tracker integration (≤10 arcsec accuracy)
- Gyroscope-assisted stabilization
- Boresight calibration
- Thermal distortion compensation
Radiation & Environmental Hardening
Parameter | Typical Design Target |
TID tolerance | 30–100 krad |
SEU mitigation | ECC + watchdog |
Operating temp | –30 °C to +70 °C |
Launch vibration | 12–15 g RMS |
Vacuum compatible optics | Required |
SWaP Optimization (Size, Weight, Power)
Standard form factors:
Platform | Mass | Power | Use Case |
2U | 1.5–2.5 kg | 4–8 W | Detection node |
3U | 2.5–4 kg | 6–12 W | Tracking + ID |
12U | 8–15 kg | 20–40 W | Multi-sensor SSA payload |
System Architecture Integration
A self-defense camera payload is typically integrated into:
- Spacecraft ADCS
- Flight computer
- Inter-satellite communication network
- Ground SSA databases
- Tip-and-cue sensor frameworks
This enables:
- Detection
- Tracking
- Classification
- Risk prediction
- Maneuver planning
