How about AI assisted OBC on Perseverance Mars Rover
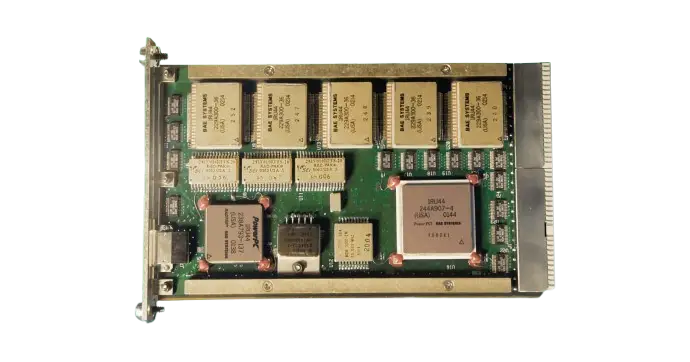
Perseverance is one of the most successful instruments landed on Mars from 2021 & still working solid! It uses two Rover Compute Element boards based on the radiation-hardened BAE RAD750 processor with ~133 MHz speed and limited RAM/storage compared to modern systems. One is active, the other is a spare for redundancy. Given time spent on telecom between Earth & Mars, if we add AI assisted OBC on rovers, this effectively improve tasks time consumption & make it way more efficient!
With AI supercomputers we enable instrument to think, become scientists instead of instruments! Obviously it also add some concerns on power consumption & safety of decision-making, but still makes huge difference in mission performance!
Software Roles
The OBC runs the flight software, which:
- Executes commands sent from Earth,
- Schedules and prioritizes rover activities,
- Monitors health and housekeeping,
- Handles telemetry and communications,
- Interacts with autonomous capabilities such as AutoNav, visual navugation that allows the rover to navigate hazards without human input.
It uses a real-time operating system and custom scheduling to balance limited compute resources and tasks.
What an AI-Assisted OBC Like OBC-64 Would Look Like
Here’s a concrete contrast between the actual Perseverance OBC and a hypothetical AI-assisted OBC based on PIC64/OBC-64:
Feature | Perseverance OBC | Hypothetical AI-assisted OBC (PIC64 / OBC-64) |
Processor | RAD750 (PowerPC, ~133 MHz) | PIC64-HPSC (8× RISC-V vector cores) |
Compute Power | ≈ hundreds of MIPS | ~8,000+ DMIPS, vector and AI acceleration >1 TFLOPS |
Memory | ≈ 128 MB DRAM + limited flash | DDR4 ECC up to 32 GB, large mass memory |
Coproc/AI Support | FPGA for vision, limited autonomy | Native AI/vector libraries (TensorFlow etc.) |
Software Stack | Real-time OS, custom scheduling | Linux / RTEMS / Xen / FreeRTOS with AI libs |
OBC-64 is essentially a modern high-performance on-board computer with scalable memory, high-speed interfaces and built-in AI acceleration.
If such a board were used instead of a RAD750, the rover would have orders of magnitude more compute resources—enough to do real-time planning and machine learning onboard rather than frequently waiting for Earth-generated commands.
Timing of Tasks & Autonomy — Avoiding Earth Command Delays
The core operational challenge on Mars is latency: ~4–22 minutes one way due to the speed of light. It’s not possible to “drive in real time” from Earth. This is why the rover must operate autonomously between command cycles.
Current Perseverance Schedule Behavior
- Earth ops uplink day-plans (waypoints, science ops) once per Martian sol.
- Rover schedules and executes sequences, handling exceptions autonomously using the on-board scheduler.
- AutoNav and autonomy are offloaded to dedicated compute where possible, but still limited by RAD750 and FPGA resources.
With an AI-Assisted OBC (PIC64)
On-board Planning & Decision Making
- Rather than uploading a precomputed sequence, the rover could plan its own next actions based on science priorities and sensor data using AI planners.
- On-board reasoning could re-prioritize tasks without needing the Earth team to intervene daily, reducing idle waiting for uplinks.
Rapid Rescheduling
- The current scheduler limits invocation time (≈30–60 s) for onboard planning because RAD750 is so constrained.
- With an OBC-64 level CPU/AI, more frequent re-planning without starving other tasks becomes viable.
Advanced Autonomy Loop
- Instead of a simple priority scheduler, an AI planner could continuously evaluate task success probabilities, energy levels, hazard risks, and science gains—creating a self-adaptive task queue.
Example Scenario
On a hazard detection:
- Current: A sequence is interrupted; rover halts, analyzes with limited compute, and then resumes once it decides a safe path. Earth may review data later.
- With AI OBC: Rover could analyze terrain continuously and generate alternative plans instantly, selecting best sequences in real time without halting or waiting for Earth.
Communication Offload
AI could compress and prioritize telemetry and imagery before sending back to Earth:
- Instead of sending raw images, the AI could send classified targets, anomaly alerts, and scientific summaries.
- Result: Lower bandwidth usage, faster ground interpretation, quicker mission adjustments.
How It Affects Task Timing
Earth latency remains — AI doesn’t change the laws of physics — but:
Aspect | Current RAD750 OBC | AI-Assisted OBC (PIC64) |
Autonomy frequency | Limited, sporadic | Continuous, dynamic |
Task re-planning latency | Seconds to minutes internally | Real-time or near real-time |
Response without Earth | Executes pre-planned sequences | Self-adaptive task selection |
Communication dependency | High | Lower — more decisions onboard |