Enabling Autonomous Lunar Exploration with OBC-Hyper-Polar and NVIDIA Jetson AGX Orin
- June 21, 2026
- CAVU Aerospace UK
As lunar exploration enters a new era, mission developers are increasingly seeking greater levels of autonomy for robotic systems operating on the Moon. Communication delays, limited visibility from Earth, and the need to traverse hazardous terrain require onboard decision-making capabilities that go far beyond traditional spacecraft computing architectures. The OBC-Hyper-Polar, integrated with NVIDIA Jetson AGX Orin technology, provides a powerful space-qualified computing platform capable of supporting Artificial Intelligence, computer vision, terrain-relative navigation, and autonomous mission operations directly on the lunar surface.
This combination creates a next-generation onboard computing solution that enables lunar rovers to perceive, analyze, and react to their environment in real time.
The lunar environment presents unique navigation challenges:
- Unmapped terrain and dynamically changing lighting conditions
- Craters, boulders, slopes, and regolith hazards
- Long communication delays with Earth
- Limited opportunities for continuous operator intervention
- Need for precise navigation near scientifically valuable but hazardous locations
Traditional rover operations often rely heavily on ground-based mission teams for route planning and hazard assessment. However, future commercial and scientific missions require increased autonomy to maximize productivity and mission success.
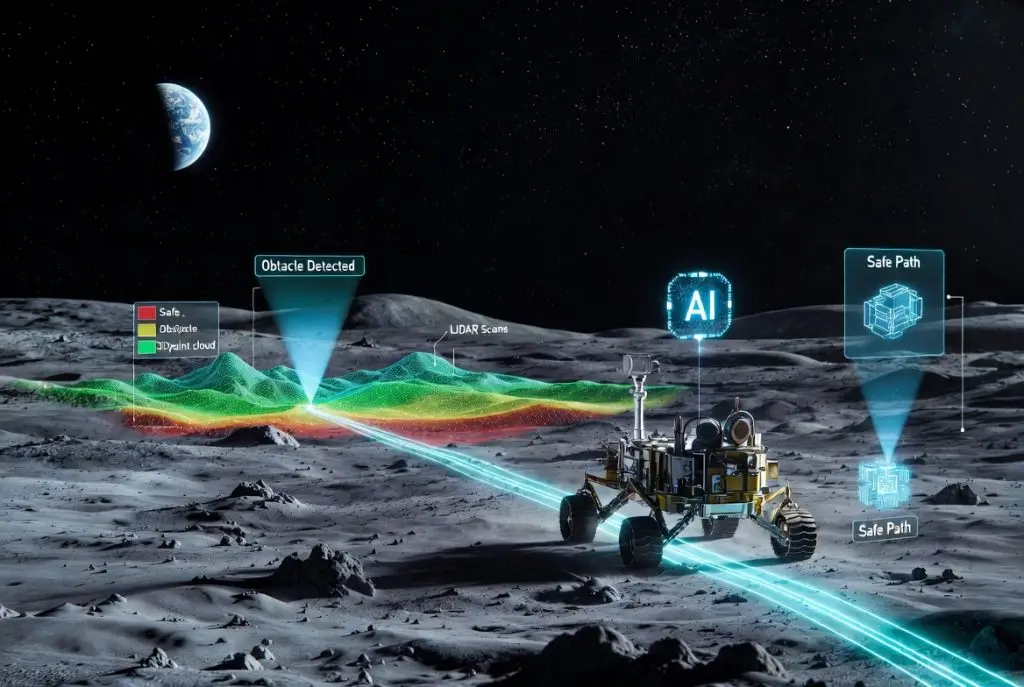
AI-Powered Terrain Relative Navigation
Terrain Relative Navigation (TRN) uses onboard sensors and AI algorithms to identify terrain features and estimate vehicle position without relying solely on external navigation aids.
The OBC-Hyper-Polar platform enables deployment of advanced AI models that can:
Using stereo cameras, LiDAR, multispectral sensors, or depth cameras, AI networks can identify:
- Rocks and boulders
- Craters and depressions
- Loose regolith regions
- Steep slopes
- Traversability hazards
Real-time classification allows rovers to autonomously select safer routes while minimizing risk to mission assets.
Deep-learning-based visual odometry algorithms running on Jetson AGX Orin can continuously estimate rover position by tracking surface features.
Benefits include:
- Reduced navigation drift
- Improved dead-reckoning accuracy
- Enhanced long-distance traverses
- Increased operational independence
Machine learning models can classify lunar surface materials and terrain types, enabling:
- Scientific target identification
- Route optimization
- Energy-efficient path planning
- Improved mobility performance
Autonomous Path Planning
One of the most demanding computational tasks for planetary exploration is autonomous route generation. The AI processing capability of OBC-Hyper-Polar allows onboard execution of:
- Occupancy grid generation
- Terrain cost mapping
- Real-time path optimization
- Dynamic obstacle avoidance
- Goal-oriented mission planning
Rather than waiting for instructions from Earth, rovers can autonomously determine the safest and most efficient route to mission objectives. This capability becomes especially valuable for missions operating near permanently shadowed regions, crater rims, and polar resource exploration zones.
NVIDIA Jetson AGX Orin for Space Applications
At the heart of the platform lies the NVIDIA Jetson AGX Orin architecture, delivering exceptional AI inference performance within a compact embedded form factor. Key advantages include:
High AI Throughput
Supports deployment of advanced neural networks for:
- Object detection
- Semantic segmentation
- Terrain classification
- Visual SLAM
- Feature extraction
- Sensor fusion
Multi-Sensor Processing
Simultaneous processing of:
- Stereo vision systems
- LiDAR sensors
- IMUs
- Star trackers
- Navigation cameras
- Scientific payload imagery
Edge AI Processing
Performing AI computations onboard eliminates dependence on continuous communication links and reduces operational latency.
This enables immediate decision-making during critical mission phases.
Sensor Fusion for Enhanced Navigation
Modern lunar rovers increasingly combine multiple sensing modalities.
The OBC-Hyper-Polar architecture enables fusion of:
- Visual navigation cameras
- Inertial measurement units
- LiDAR point clouds
- Wheel odometry
- Sun sensors
- Star trackers
AI-assisted sensor fusion improves navigation robustness in environments where any single sensor may be degraded by lighting conditions, dust contamination, or terrain complexity.
While terrain-relative navigation is a primary application, OBC-Hyper-Polar also supports a broad range of onboard AI workloads:
- Scientific image analysis
- Autonomous target recognition
- Health monitoring and fault detection
- Predictive maintenance
- Payload data processing
- Mission planning optimization
- Communications management
- Multi-agent robotic coordination
This transforms the onboard computer from a traditional command-and-control system into an intelligent mission processing platform. As lunar missions become more ambitious, autonomy will become a fundamental requirement rather than an optional capability.
By combining the reliability of the OBC-Hyper-Polar architecture with the advanced AI processing capabilities of NVIDIA Jetson AGX Orin, mission developers gain a powerful platform capable of supporting the next generation of intelligent lunar rovers. The result is greater operational efficiency, reduced mission risk, improved scientific return, and the ability to explore regions of the Moon that would otherwise be inaccessible using conventional rover architectures. OBC-Hyper-Polar enables mission developers to move beyond remotely operated robotics and toward truly autonomous lunar exploration systems.